Complete Carduino Build Guide
Step-by-Step Instructions to Build Your Own Arduino-Based Mini Robot

Operating Modes
Understanding Carduino's three modes of operation
Remote Control Mode
Control Carduino via Processing interface with real-time direction and speed commands from PC.
Obstacle Detection Mode
Autonomous movement at constant speed, modifying trajectory to avoid obstacles.
Sound Navigation Mode
Autonomous movement that changes trajectory when detecting loud sounds.
Required Components
Complete parts list for building Carduino
Main Platform
Power System
Motor Control
Sensors
Odometers
Mechanical Parts
Cables & Connectors
Accessories
Required Tools
PC
For software loading
USB Cable
Connection between mini-robot and PC
Wire Stripper
Cutting and stripping cables
Punch
For making perforations
Sandpaper
Sanding marquetry panel, rounding edges
Cutter
Cutting marquetry panel and bakelite board
Soldering Iron
For making electronic component connections
Desoldering Pump
For removing poorly made connections
Required Software
Arduino IDE
1.8.x or newerIntegrated Development Environment for Arduino programming
Processing IDE
3.5.x or newerDevelopment environment for the Processing programming language
Firmata Library
Included with Arduino IDEStandard protocol for communicating with microcontrollers
Bluetooth Drivers
System dependentDrivers for Arduino Bluetooth module communication
Educational Documents
Arduino Basics
Comprehensive guide to Arduino basics, terminology, and programming fundamentals
Arduino Libraries
Step-by-step guide to creating custom Arduino libraries with practical examples
Circuit Simulation
Complete guide to electronic circuit simulation using Proteus software
PC Communication
Guide to establishing communication between PC and Arduino for data exchange
Soldering Guide
Essential tips and techniques for achieving quality soldering in electronics projects
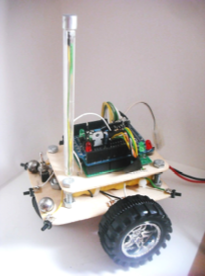
Step-by-Step Assembly
Complete construction guide with detailed instructions
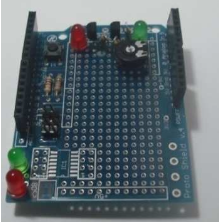
Basic Shield Assembly (v4)
Solder male pin strip to shield inputs/outputs, add resistors [Rs1,Rs2], reset button, and LEDs [Ls1,Ls2]. Add female-female connectors for stacking shields.
Power System Assembly
Assemble power cable and power stage components for battery management.



Status LEDs Installation
Install status LEDs near front of shield for easy battery state visualization.
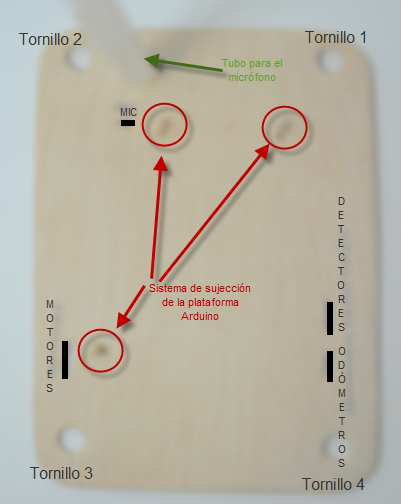
Platform Preparation
Download templates and prepare platform structure with perforations and bakelite boards.


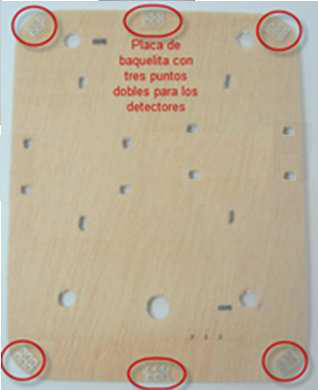

Obstacle Detectors Installation
Mount pushbutton sensors on bakelite boards with proper wiring.
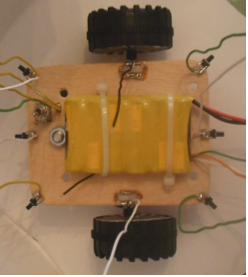
Motor Installation
Fix two motors [M1, M2] using cable ties through created perforations.
Odometers Assembly
Install infrared sensors for odometry with proper resistance connections.

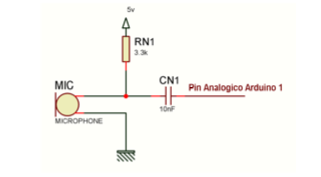
Microphone Installation
Mount 3-pin electret microphone with proper wiring and insulation.


On/Off Switch Installation
Install power switch with proper terminal connections.


Battery Installation
Mount battery holder to ensure proper cable lengths for shield connection.
Wiring Assembly
Complete all wiring connections following detailed schematics.
Separation Screws
Install separation screws with proper nut positioning.
Connector Installation
Add connectors to cable terminals and mark for easy identification.
Shield Assembly
Mount shield according to circuit map and wiring connections.
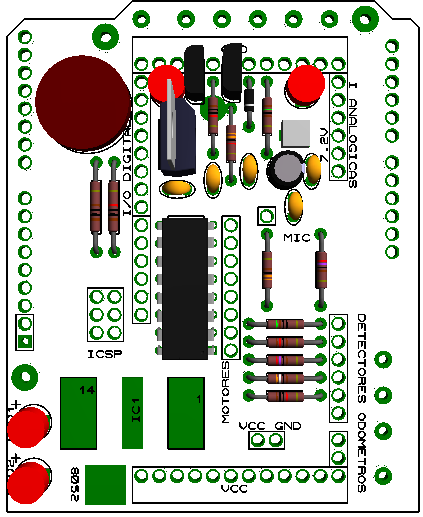

Arduino Platform Integration
Attach shield to Arduino platform and position on upper platform.
Counterweights
Add counterweights for proper balance and stability.
Wiring Diagrams
Detailed connection schematics for all components
Status LEDs
Connection diagram for status LEDs showing proper resistor values and connections.
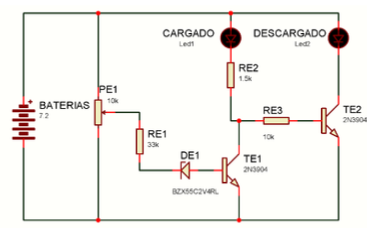
Power Stage
Complete power stage wiring including voltage regulator, capacitors, and power coil.

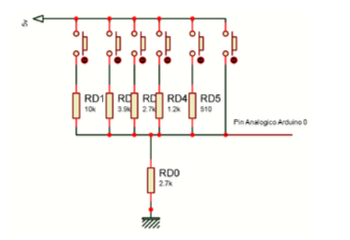
Obstacle Detectors
Wiring for all 6 pushbutton obstacle detectors with proper resistance values.
Sound Navigation
Microphone circuit with amplification and filtering components.
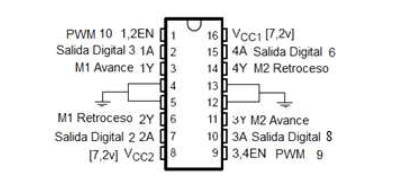
Motor Control
H-bridge L293D motor driver connections for both motors.
Odometers
Infrared sensor CNY70 connections for wheel rotation sensing.

Software Implementation
Arduino code and Processing interface setup
Complete Source Code
Download the complete Carduino project with all Arduino sketches and libraries
Obstacle Detection
Sound Navigation
Remote Control
⚠️ Important Safety Notes
Conclusion
Carduino demonstrates the potential of embedded systems in creating intelligent, connected devices for modern living. This project serves as an excellent foundation for learning robotics, electronics, and programming while providing a practical platform for artistic and educational applications.
© 2025 Illuminauta. Crafted with ❤️ and lots of ☕